The Death of the Dot Cloud: How Handheld LiDAR and Gaussian Splatting Form the Perfect Reality Capture Marriage

For years, the reality capture industry has been stuck in a frustrating compromise. If you wanted absolute, millimeter-accurate spatial data for an architecture project or urban development scheme, you had to haul heavy terrestrial laser scanners on massive tripods, methodically moving them from station to station while praying the lighting wouldn't ruin the exposure. If you wanted photorealism for digital twins or interactive simulations, you pivoted to photogrammetry, spending hours smoothing out jagged meshes and fixing broken geometry. But a fascinating paradigm shift detailed on Quasa shows that the boundary between engineering-grade accuracy and flawless visual fidelity has officially collapsed.
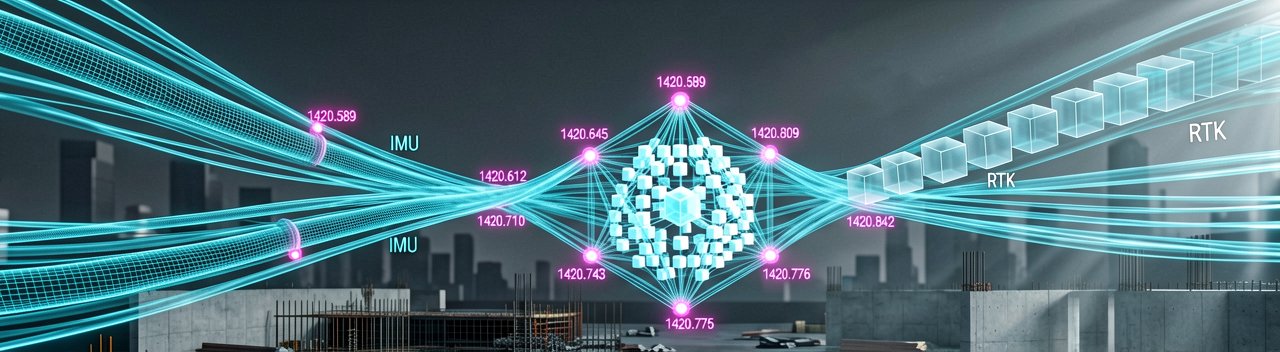
Hardware developer XGRIDS is leading this charge by packing an entire multi-sensor survey suite into lightweight, handheld devices like the Lixel series and PortalCam. Instead of forcing technicians to choose between sparse point clouds and hollow visual shells, these compact systems fuse multi-line LiDAR sensors with dense RGB camera arrays into a highly portable under-one-kilogram frame. The magic happens through a sophisticated multi-SLAM fusion architecture that ties together 360-degree laser rangefinding, high-resolution panoramic cameras, an internal measurement unit (IMU), and RTK satellite positioning. It allows operators to simply walk through a complex environment—whether it is a narrow subway tunnel, a bustling construction site, or a historical cathedral—and capture every surface continuously without losing absolute spatial orientation.
From Hardware Architecture to Hyper-Precise Performance Metrics
The real secret sauce behind this tech is how the raw hardware data feeds directly into advanced 3D Gaussian Splatting (3DGS) via the company's Lixel CyberColor software. Traditional scanners output rigid, colorized points that still look like a loose collection of dots when zoomed in closely. XGRIDS leverages edge AI to transform those coordinates into radiance fields, essentially mapping how light interacts with every physical surface to generate a walkable, photorealistic digital landscape in real time. Moving from raw capture to final asset creation becomes a fluid, single-mobilization process where the data can even be exported straight into native parametric BIM models via intelligent software plugins.
When you look closely at the performance metrics, the architectural capability translates into raw, undeniable efficiency. The handheld systems blast out anywhere from 200,000 to 640,000 points per second, establishing a massive data blanket across operational ranges spanning from half a meter up to 300 meters depending on the model tier. This relentless density yields a real-time absolute accuracy of 3 centimeters and a relative surface tolerance of just 1 centimeter, giving professionals survey-grade data with a point cloud thickness of only 5 millimeters. By condensing what used to be a five-day site workflow down into a quick ten-minute walk, this combination of handheld mobility and real-time computing is proving that the future of digital twins isn't just fast—it is stunningly lifelike.
Behind the Scenes: Inside the Real-Time Multi-Sensor Pipeline
Behind the Scenes: Translating raw spatial telemetry into an instantaneous, photorealistic radiance field requires overcoming massive computational bottlenecks. At the silicon level, the handheld architecture handles concurrent data pipelines that would choke standard embedded systems. The device must ingest a continuous stream of point coordinates alongside 48-megapixel imagery, all while a high-frequency inertial measurement unit feeds orientation updates to a decentralized tight-coupling SLAM filter. This real-time alignment relies on localized hardware-accelerated feature tracking, extracting key points from incoming visual frames while the point-cloud registration engine performs rapid iterative closest point calculations across a rolling temporal window.
To prevent memory saturation during extended walks, the internal processing loop employs a dynamic spatial voxelization strategy. As the operator moves through an environment, the raw point clouds are aggressively downsampled inside an adaptive octree data structure, discarding redundant coordinates while preserving high-gradient geometric features like sharp architectural corners or structural edges. At the same time, the system applies a hardware-level timestamping mechanism that synchronizes camera exposures with laser pulses down to the microsecond level. This tight temporal cohesion ensures that visual pixel data and geometric coordinates are perfectly bound, eliminating the ghosting artifacts that traditionally plague hand-carried reality capture rigs.
The transition from a clean point cloud to a 3D Gaussian Splatting model shifts the workload onto an edge-optimized neural rendering pipeline. Instead of relying on a distant cloud server to crunch the data, the system initializes Gaussian primitives directly from the freshly filtered LiDAR seed points, using them as geometric anchors to bypass the computationally expensive "structure from motion" phase. The embedded GPU then runs an optimized rasterization pass, executing localized gradient descent to iteratively refine the opacity, scale, and spherical harmonics of each splat. This spatial layout allows the device to render complex light-scattering properties and view-dependent reflections on the fly, transforming a collection of raw coordinates into a true radiance field.
Memory bandwidth optimization represents the final, crucial pillar of this embedded systems engineering feat. By utilizing customized data structures that store covariance matrices in half-precision floating-point formats, the pipeline cuts required bus bandwidth by nearly fifty percent without degrading spatial accuracy. This compression allows the real-time visualization engine to maintain a steady sixty frames per second on the integrated display, giving the field operator instant visual feedback on data coverage and quality. The result is a highly parallelized, self-contained pipeline that seamlessly unifies raw geometric physics with deep visual rendering, redefining the limits of field-ready digital twin technology.
Reading Between the Lines: The Reality Gap in Instant Reality Capture
Reading Between the Lines: The promotional promise of frictionless, real-time digital twins inevitably collides with the messy physics of the real world. While the hardware capability of spinning out millions of points per second while walking is an undeniable engineering triumph, tech industry hype tends to gloss over the downstream computational debt. Generating a 3D Gaussian Splatting model on an optimized edge device is one thing; manipulating that massive, unstructured radiance field inside a legacy municipal GIS database or a rigid BIM environment is an entirely different bottleneck. The industry risks trading the tedious hours spent cleaning up terrestrial point clouds for hours spent figuring out how to slice, edit, and categorize billions of unclassified volumetric splats that traditional CAD software cannot even parse.
Furthermore, the claim of uniform centimeter-level accuracy deserves a healthy dose of field-tested skepticism, particularly when transitioning from controlled indoor corridors to chaotic outdoor environments. In dense urban canyons or heavily forested sites, the dual-SLAM architecture faces a distinct paradox: the visual sensors get blinded by shifting shadows and glass reflections, while the RTK satellite signals degrade due to multi-path interference. When the absolute positioning anchor wavers, the system must rely entirely on its internal IMU and laser odometry to prevent drift. While a three-centimeter accuracy threshold holds true during a steady walk down a well-lit hallway, that precision can degrade rapidly when an operator is forced to climb over debris or navigate through low-contrast, monochromatic concrete structures.
There is also an unresolved tension between the ephemeral nature of photorealism and the permanent requirements of architectural documentation. Gaussian splatting achieves its hyper-realistic look by capturing view-dependent reflections and ambient lighting conditions at the exact moment of scanning. However, a digital twin intended for long-term urban planning needs to represent immutable geometry, not a highly detailed snapshot of transient weather patterns, parked delivery trucks, or temporary construction scaffolding. Stripping away the visual noise to isolate the underlying structural truth still requires a massive amount of manual, human-guided semantic segmentation, meaning the promised ninety-seven percent time savings in the field might simply be deferred to the back office.
Ultimately, this technological leap changes the role of the surveyor from a precise data gatherer to a critical data curator. As handheld LiDAR democratizes spatial capture—allowing virtually anyone with a one-kilogram device to map a city block in minutes—the market will likely be flooded with visually stunning but structurally unverified models. The real challenge for the next generation of digital twin platforms will not be how fast they can ingest these dazzling radiance fields, but how intelligently they can audit them for actual, constructible truth before a single shovel hits the ground.
Reality capture has finally reached the point where we can clone a skyscraper in the time it takes to grab a coffee, leaving us with just one minor problem: figuring out what on earth our existing software architectures are supposed to do with a hyper-realistic, multi-gigabyte cloud of digital dust.
Artūras Malašauskas is an AI Systems Integrator with 20+ years of production-grade web engineering experience. He has designed, shipped, and scaled enterprise Python/PHP systems for logistics, SaaS, and public-sector clients. For the past year, he has focused exclusively on AI integrations: deploying open-source LLMs, building generative media pipelines (image, audio, video), and engineering multi-agent workflows for real production environments. His standard: reproducibility, security, cost-efficient inference—no vaporware. He documents and evaluates emerging AI tooling, separating verified capabilities from marketing noise. Technical editor at: muza-ai.eu, ai-verslas.lt, ai-naujinos.lt Connect on LinkedIn
Comments