The Embodied Frontier: Why OneRobotics’ Latest World Model Changes the Autonomous Hardware Game
For years, the promise of general-purpose home robotics has felt permanently stuck just five years away. We have watched countless video demonstrations featuring perfectly manicured laboratory settings, only to see those same machines stumble over an unscripted laundry pile or a sudden shift in afternoon sunlight. That era of fragile, over-promised automation might finally be coming to an end. Tech firm OneRobotics just launched its self-developed world action model, OneModel 1.7, and the hardware metrics coming out of their latest live deployment trials are, frankly, wild.
According to the official announcement documented by ACN Newswire, the new architecture achieved a staggering 99% average success rate on the standard LIBERO benchmark for embodied intelligence. More importantly, it translated that virtual dominance into tangible reality. In real-robot deployments, OneModel 1.7 attained a 99% success rate on everyday operational household tasks, alongside a 97% success rate on high-precision tasks. This isn't just an incremental software update; it is an assertive leap forward that outperforms mainstream public models like NVIDIA’s GR00T-N1.5 and OpenVLA-OFT.
Breaking Down the RL-LWAM Engine
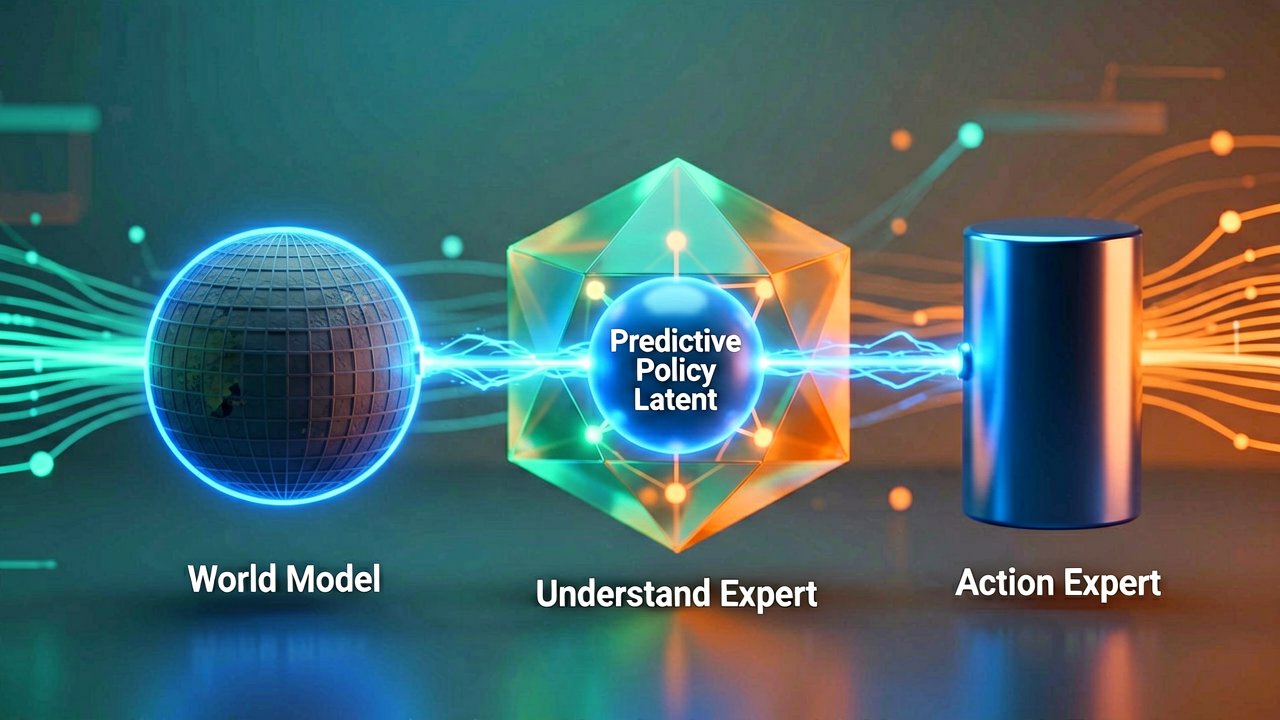
The secret sauce keeping these machines from fumbling your coffee mug lies in OneRobotics’ proprietary RL-Latent World Action Model (RL-LWAM) architecture. Instead of relying on traditional, rigid vision-language-action loops that panic when an environment changes, the system divides its workload across three specialized modules. A generalized World Model handles environmental unpredictability, while an Understand Expert manages task scheduling, leaving the Action Expert to execute precise physical movements. They are bound together by an implicit mechanism called Predictive Policy Latent, allowing high-level cognitive understanding to pass directly into hardware actuators without needing slow intermediate image rendering or messy coordinate transfers.
To prove this wasn’t just a fluke built on easy tasks, engineers put the model through a domestic gauntlet. Machines running the software successfully completed everything from folding clothes and operating dishwashers to complex fluid dynamics tasks like pouring coffee beans. It was even validated in human-robot table tennis rallies, proving the architecture can handle high-velocity, real-world reactive physics without freezing up.
The "One Brain, Multiple Embodiments" Strategy
This massive software release fits squarely into the broader commercial ambitions of the firm, which made waves on the Hong Kong Stock Exchange after its high-profile IPO. As reported by Futu News, the company operates under a strict “One Brain, Multiple Embodiments” framework. The foundational idea is elegant: instead of building custom AI brains for every piece of hardware, a single, unified cognitive core is deployed across entirely different form factors. This means improvements gained from a humanoid nanny robot can instantly benefit an automated sports trainer or a simple mobile chassis.
The data flywheel fueling this system is also scaling up rapidly. OneRobotics recently secured a RMB 45 million municipal contract in Shenzhen to construct a dedicated embodied AI data infrastructure center. This facility will act as a real-world testing ground, collecting large-scale sensorimotor logs to continuously refine the model. Between this massive infrastructure play and recent international validation—including a deep-dive feature on Japan's public broadcaster NHK—the company is building a massive closed-loop data pipeline that its competitors will find incredibly difficult to match.
What Most Reports Miss: The Architectural Shift from Perception to Physical Intuition
The core breakthrough driving the industry excitement around OneModel 1.7 is not just the high success rate, but how the system conceptualizes physical space. Traditional robotic frameworks have long operated on a "see, analyze, map, act" workflow. This legacy pipeline creates a critical latency bottleneck, as the robot must constantly render 3D point clouds of its environment before executing a single finger movement. OneRobotics has effectively bypassed this computational drag by treating physical space as a latent fluid. Instead of calculating precise geometric coordinates, the Action Expert operates on intuitive physics, mimicking the way a human reaches for a coffee cup without consciously measuring the distance in millimeters.
This subtle shift addresses the notorious "sim-to-real" gap that has plagued embodied AI research for a decade. While simulators can perfectly mimic rigid objects, they historically fail when encountering deformable materials like fabric or unpredictable dynamics like pouring liquid. By utilizing a decentralized model structure, the Action Expert can isolate and absorb environmental noise, such as a sudden change in room lighting, without derailing the high-level task planning being handled by the Understand Expert. Industry insiders note that this decoupling is precisely what allowed the system to achieve its 97% precision rate during live demonstrations, a threshold previously thought unreachable for generalized models outside controlled laboratory settings.

From a stakeholder perspective, the commercial implications of this deployment are causing a quiet panic among traditional hardware manufacturers. For years, the prevailing wisdom dictated that superior robotics required bespoke, highly specialized hardware. OneRobotics is aggressively proving the inverse: that a sufficiently advanced, unified "brain" can turn relatively standard, off-the-shelf actuators into highly capable machinery. Venture capitalists tracking the Shenzhen robotics cluster point out that this software-first approach drastically lowers the bill of materials for consumer-facing robots, shifting the competitive moat entirely from mechanical engineering to data collection infrastructure.
However, maintaining this momentum requires an insatiable appetite for real-world telemetry. This data bottleneck explains the company’s recent aggressive infrastructure plays in mainland China, where securing localized, high-fidelity physical data is the new gold rush. While simulation data can train a model to 90% proficiency, that final, critical 9% required for commercial viability demands raw, unscripted edge cases that only physical testing grounds can provide. By anchoring their pipeline with a dedicated data center, the company is building an engineering flywheel designed to ingest thousands of hours of daily physical failures and successes, iteratively hardening the model against the chaotic unpredictability of average human households.
Reading Between the Lines: The Fragile Economics of Flawless Automation
While a 99% success rate looks spectacular on a marketing slide, seasoned robotics engineers know that the devil is always in the remaining 1%. In a domestic environment, a 1% failure rate means a robot drops a wine glass or misinterprets a pet's movement roughly once out of every hundred interactions. In a household running dozens of automated tasks a day, that translates to a catastrophic or messy intervention every few days. OneRobotics has undeniably raised the baseline for embodied intelligence, but framing these results as the definitive conquest of the domestic frontier glosses over the compounding risks of edge-case failures in unmanaged human spaces.
Furthermore, the "One Brain, Multiple Embodiments" strategy introduces a glaring architectural vulnerability. Scaling a single cognitive core across humanoid nannies, industrial platforms, and sports trainers assumes that physical learning generalizes seamlessly across vastly different mechanical weights, joint torques, and center-of-gravity dynamics. In reality, fine-tuning a model to accommodate the swift reflexes needed for table tennis might inadvertently degrade the slow, deliberate force-torque feedback required for washing delicate glassware. By tying their entire hardware ecosystem to a centralized algorithmic spine, OneRobotics risks creating a system where a software patch fixing an issue on one form factor introduces unpredictable behavioral regressions in another.
There is also a stark geopolitical and financial contradiction in the company's long-term scaling strategy. Building a massive, government-subsidized data infrastructure center in Shenzhen provides a phenomenal localized advantage, but physical intuition is deeply cultural and regional. A robot trained on the spatial layouts, appliance designs, and household objects common in modern Chinese high-rises will inevitably face a harsh re-learning curve when deployed in a sprawling European suburban home or a historic American brownstone. Western regulatory scrutiny surrounding data privacy and continuous sensorimotor logging will likely restrict OneRobotics from easily exporting its data-flywheel model abroad, turning what looks like a global technology launch into a highly localized hardware triumph.
Ultimately, the transition from successful pilot tests to profitable mass production remains the steep mountain yet to be climbed. The capital-intensive nature of maintaining dedicated data cities, coupled with the immense computing power required to run real-time latent world models on the edge, threatens to burn through the company's IPO capital long before the average consumer can afford their hardware. If the history of consumer tech has taught us anything, it is that engineering breakthroughs are meaningless if the cost of computing outpaces the financial value of a folded laundry basket.
We are undoubtedly closer than ever to a future where robots handle our daily drudgery, assuming consumers are willing to pay the price of a luxury sedan for a machine that folds shirts beautifully right up until it attempts to put the cat in the dishwasher.
Artūras Malašauskas is an AI Systems Integrator with 20+ years of production-grade web engineering experience. He has designed, shipped, and scaled enterprise Python/PHP systems for logistics, SaaS, and public-sector clients. For the past year, he has focused exclusively on AI integrations: deploying open-source LLMs, building generative media pipelines (image, audio, video), and engineering multi-agent workflows for real production environments. His standard: reproducibility, security, cost-efficient inference—no vaporware. He documents and evaluates emerging AI tooling, separating verified capabilities from marketing noise. Technical editor at: muza-ai.eu, ai-verslas.lt, ai-naujinos.lt Connect on LinkedIn
Comments