RLWRLD Unveils RLDX-1, a Dexterity-First Foundation Model for Humanoid Robots
The robotics foundation model landscape received a focused challenger this week when RLWRLD unveiled RLDX-1, a system explicitly engineered for dexterous manipulation rather than broad generalist capabilities. The announcement came during a launch event titled "Dexterity Night in SF," where the company positioned the model as a direct response to what CEO Junghee Ryu calls the real bottleneck of the humanoid era.
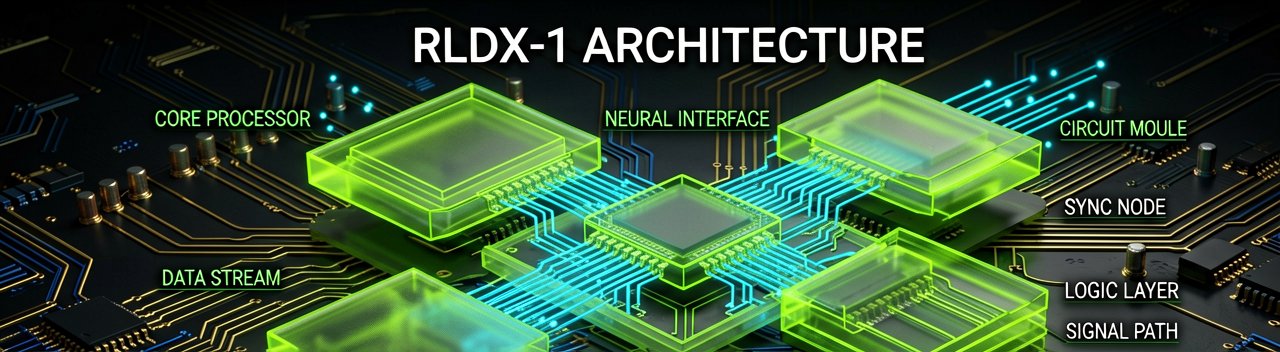
While most Vision-Language-Action (VLA) models have chased scale and versatility, RLDX-1 takes a different architectural approach. The model's core innovation is a Multi-Stream Action Transformer (MSAT) that processes vision, language, action, tactile, and memory signals through independent streams before fusing them via joint attention. This design choice addresses a fundamental problem: in conventional transformers, whichever modality dominates the gradient absorbs all capacity while others become decorative.
According to the official RLDX-1 documentation, the architecture gives each modality its own processing stream. This matters for tasks involving dynamic weight shifts, such as pouring liquid from a pot into a cup, where visual input alone cannot capture the changing mass of the vessel.
RLWRLD demonstrated the model across three high-bar evaluations during the technical session led by Chief Scientist Jinwoo Shin, also a professor at KAIST. The results showed RLDX-1 outperforming NVIDIA's Isaac GR00T N1.6 by 10.7 percentage points on the GR-1 Tabletop benchmark. More notably, the model scored 70.6 on RoboCasa Kitchen—the first VLA model to break the 70-point mark on the long-horizon, contact-rich benchmark.
The coffee-pouring demonstration on WIRobotics' ALLEX humanoid achieved a 70.8% success rate, roughly double that of competing models. A live-recorded demo of the "Pot-to-Cup Pouring" task, in which the robot hand sensed the changing weight of the vessel in real time, drew audible applause from the audience (which, in robotics demos, is a rare and meaningful metric).
RLDX-1 was developed using NVIDIA's robotics and AI stack, including Isaac GR00T, Isaac Lab, Isaac Sim, and cuRobo for simulation, with Hopper GPUs for training and Jetson AGX Thor with TensorRT for inference. Amit Goel, Head of Robotics Ecosystem and Edge AI Product at NVIDIA, appeared at the launch event and stated that RLWRLD is one of the core partners in the physical AI ecosystem NVIDIA is building.
The model runs across multiple robot embodiments from a single backbone, including the WIRobotics ALLEX humanoid, the Franka Research 3 collaborative robot, and the open-source OpenArm platform. This cross-embodiment capability addresses a key industry concern: architectures locked to a single hardware vendor create friction for deployment at scale.
RLWRLD's investment roster includes major enterprises across multiple sectors: SK Telecom, LG Electronics, CJ Logistics, Lotte, KDDI, ANA Holdings, Mitsui Chemicals, and Shimadzu Corporation. The company is currently running joint benchmark development, proof-of-concept projects, and Robotics Transformation initiatives with more than ten large enterprise partners.
The technical report, available on arXiv, details the five regimes of dexterity that shaped RLDX-1's design: grasp diversity, spatial precision, temporal precision, contact precision, and context awareness. Each regime represents a specific failure mode of today's robots and each one shapes a specific piece of the model.
For instance, the Motion Module extracts motion features from space-time visual correspondences to address tasks where single-frame policies fail—like catching fast-moving objects on conveyor belts. The Physics Module gives tactile and torque signals their own streams and predicts future contact states alongside actions, allowing the policy to anticipate contact transitions before they happen.
Following the U.S. debut, RLWRLD plans to host RLDX-1 launch events in Japan and Korea in the coming weeks. The company framed RLDX-1 as a starting point rather than a destination, with CEO Ryu describing a roadmap toward a "4D+ world model" that goes beyond vision, language, and action to jointly predict and generate contact, torque, and robot state on a temporal axis.
The panel discussion featured humanoid startup CEOs Hiroto Yamamoto of Enactic, Quanting Xie of Origami Robotics, and Jay Li of Proception AI. The group converged on three themes shaping the next phase of humanoid robotics: the importance of cross-embodiment architectures, the structural moat created by real-world industrial data partnerships, and the emerging global standards race forming around robotics foundation models.
Whether this dexterity-first approach becomes the industry standard or remains a specialized solution depends on whether manufacturers can actually deploy these models in production environments without the friction that has plagued robotics AI for years. The benchmarks look impressive, but the real test comes when a robot needs to pour coffee in a factory breakroom at 3 AM without spilling.
Artūras Malašauskas is an AI Systems Integrator with 20+ years of production-grade web engineering experience. He has designed, shipped, and scaled enterprise Python/PHP systems for logistics, SaaS, and public-sector clients. For the past year, he has focused exclusively on AI integrations: deploying open-source LLMs, building generative media pipelines (image, audio, video), and engineering multi-agent workflows for real production environments. His standard: reproducibility, security, cost-efficient inference—no vaporware. He documents and evaluates emerging AI tooling, separating verified capabilities from marketing noise. Technical editor at: muza-ai.eu, ai-verslas.lt, ai-naujinos.lt Connect on LinkedIn
Comments