Inside ABB’s PickMaster® Lite: A Technical Breakdown of Robotic Innovation
Industrial automation often feels like a balancing act between raw performance and engineering headaches. Machine builders and system integrators routinely spend weeks configuring communication protocols, tuning motion control loops, and mapping out complex picking paths. Aiming to cut through that complexity, ABB Robotics launched PickMaster® Lite, a streamlined incarnation of its classic software suite designed precisely to democratize high-speed, vision-guided picking.
Instead of forcing developers to write heavy, custom logic from scratch, this tool relies on an intuitive, task-based interface packed with pre-configured templates. It handles the core engineering overhead—like precise conveyor tracking and real-time vision alignment—right out of the box, drastically narrowing the technical barrier to entry. Because it communicates natively with programmable logic controllers (PLCs) and human-machine interfaces (HMIs) through the OmniCore controller, OEMs do not have to scrap their existing machine designs to reap the benefits of smart automation.
Architectural Efficiency and Real-World Velocity
The true genius of this architecture lies in how it translates abstract data into physical speed. According to data published by , the streamlined platform cuts development risk while dropping engineering effort by 30% and slashing commissioning time by a staggering 25%. It strips away the unnecessary fluff of overly complex software suites, focusing heavily on value-oriented, high-volume standard cells in sectors like e-commerce, pharmaceuticals, and electronics.
Despite its lightweight footprint, the software actually extracts up to 15% higher throughput compared to conventional pick-and-place software or standard PLC-based setups. For advanced validation, developers can mirror the physical cell inside the Design World reported RobotStudio platform, constructing a digital twin to optimize pathways and simulate hardware loads long before a single bolt is tightened on the factory floor. Ultimately, it delivers a scalable pathway that lets factories scale up to full PickMaster or PickMaster Twin ecosystems when production demands eventually outgrow the baseline configuration.

Architectural Deep Dive into Low-Latency Trajectory Calculation
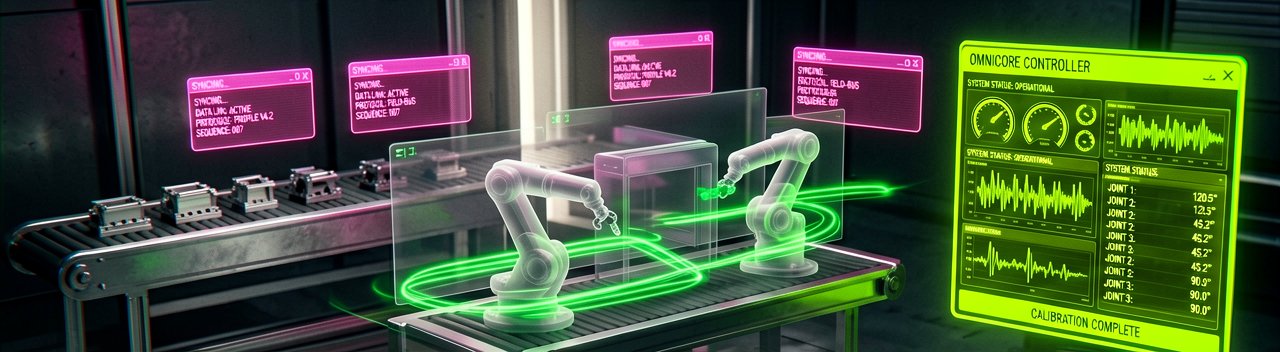
Behind the Scenes: The architectural magic of PickMaster® Lite relies on a decoupled, deterministic processing loop that prioritizes motion execution over less critical communication tasks. Standard PLC setups often struggle with asynchronous sensor jitter because they handle conveyor encoder ticks and vision frame arrivals within the same rigid cyclic task. ABB’s system bypasses this limitation by leveraging the OmniCore controller’s hardware-level interrupts. The software maps vision system coordinates directly to high-speed conveyor tracking boards, ensuring the robot recalculates its picking path based on actual physical movement rather than stale image timestamps.
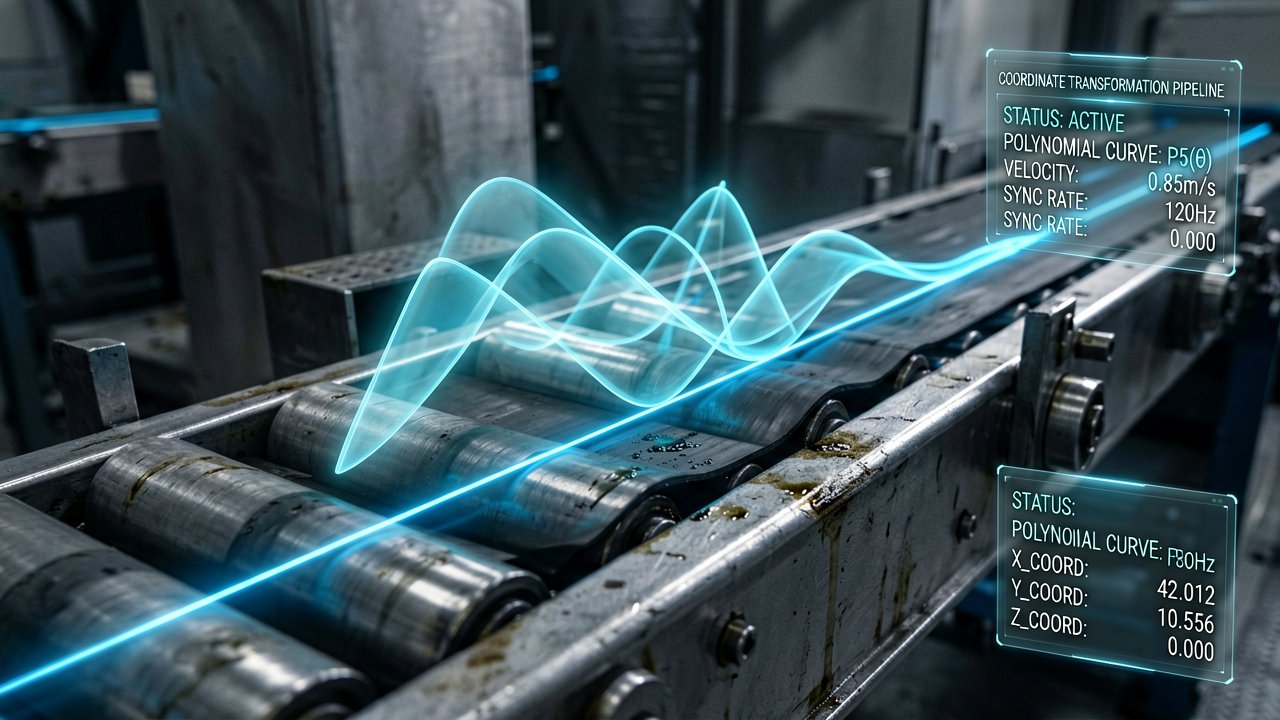
From a systems engineering perspective, a major bottleneck in vision-guided robotics is the transformation matrix pipeline. When a camera captures an image of a moving part, that coordinate data must be instantly transformed from the camera pixel space to the 3D robot workspace, and finally into the dynamic conveyor frame. PickMaster® Lite optimizes this vector mathematics by embedding specialized coordinate transformation algorithms directly into the real-time core of the robot controller. This architecture reduces data translation latency to sub-millisecond levels, preventing the path-planning algorithms from executing erratic micro-corrections at high speeds.
This dynamic path optimization directly addresses the physics of mechanical wear and energy expenditure. Instead of generating rigid, linear point-to-point paths that force the joints to accelerate and decelerate violently, the software smooths the trajectory into continuous quintic polynomials. The controller evaluates the conveyor’s real-time velocity vector and blends the approach, grasp, and retreat motions into a single fluid curve. This mathematical optimization minimizes jerk, which keeps the robot operating smoothly at peak speeds while protecting the gearboxes from premature fatigue.
Data synchronization across the factory floor relies on highly optimized fieldbus communication profiles. The software uses pre-configured PROFINET or EtherNet/IP data blocks to transmit status bits, task IDs, and error codes back to the master PLC without bloating the network bandwidth. By standardizing these memory maps, developers can treat the entire robotic cell as an isolated state machine. The PLC simply shifts state registers to initiate cycles, while the underlying software independently handles the precise timing required to intercept moving targets without dropping packets or missing components.
The Hidden Trade-offs of Automation Lite
Reading Between the Lines: The industrial automation sector loves the narrative of democratizing technology, but simplifying complex robotic systems rarely comes without strings attached. While a 30% reduction in engineering effort sounds incredibly enticing on a corporate press release, it masks a fundamental engineering trade-off. By abstracting away the low-level RAPID programming code and replacing it with template-driven configurations, the platform inevitably creates a walled garden. System integrators might get their cells up and running days ahead of schedule, but they may eventually find themselves hitting a rigid functional ceiling when a highly customized, non-standard material handling sequence is required.
There is also an interesting contradiction in pitching this software simultaneously as an entry-level solution and a high-volume performance driver. The promised 15% throughput increase over standard PLC setups relies heavily on the assumption that the end-user is utilizing ABB's premium OmniCore hardware to its absolute limit. In reality, smaller factories adopting a "lite" solution often use legacy conveyors, cheaper vision sensors, or mismatched mechanical components. When paired with subpar ancillary hardware, the software's advanced predictive tracking loops can only do so much to compensate for mechanical backlash and fluctuating conveyor speeds, likely narrowing those theoretical efficiency gains.
Furthermore, the upgrade path from this streamlined platform to the full-scale PickMaster Twin ecosystem is rarely as seamless as the marketing suggests. While a digital twin sounds like the ultimate tool for future-proofing an assembly line, the data architecture required to sustain an entry-level picking cell is vastly different from a fully synchronized simulation environment. Companies looking to scale up will face a secondary steep learning curve, as they transition from a system designed to hide complexity to one that requires deep, granular mastery of physical simulation variables. The upfront simplicity is undeniably a massive win for immediate deployment, but forward-thinking engineers must weigh whether they are merely deferring their technical debt to a later date.
"In the world of factory automation, 'plug-and-play' usually means you plug it in and play therapist to your engineering team for three weeks; if this new tool actually shaves off a quarter of the commissioning headache, it might just save a few system integrators from graying prematurely."
Artūras Malašauskas is an AI Systems Integrator with 20+ years of production-grade web engineering experience. He has designed, shipped, and scaled enterprise Python/PHP systems for logistics, SaaS, and public-sector clients. For the past year, he has focused exclusively on AI integrations: deploying open-source LLMs, building generative media pipelines (image, audio, video), and engineering multi-agent workflows for real production environments. His standard: reproducibility, security, cost-efficient inference—no vaporware. He documents and evaluates emerging AI tooling, separating verified capabilities from marketing noise. Technical editor at: muza-ai.eu, ai-verslas.lt, ai-naujinos.lt Connect on LinkedIn
Comments