The Sim-to-Real Leap: How WIRobotics’ ALLEX Simulation Model is Rewriting the Physical AI Playbook

For years, the robotics industry has grappled with the infamous "Sim-to-Real gap"—that frustrating disconnect where an AI algorithm performs beautifully in a virtual testing sandbox but completely fumbles when deployed on actual physical hardware. It’s an expensive, time-consuming bottleneck that has kept many advanced humanoid concepts locked away in research labs. However, South Korean innovator WIRobotics is looking to shatter that barrier with the public rollout of its new technology disclosure roadmap, headlined by the official release of the ALLEX simulation model. By opening up its proprietary architecture, the company is aiming to establish a globally accessible Physical AI development ecosystem that could democratize how the next generation of embodied intelligence is trained and validated.
The strategic release, which has captured attention across international networks like Vietnam Investment Review, represents a calculated pivot for WIRobotics from commercializing wearable mobility gear to pioneering foundational infrastructure for general-purpose humanoids. This initiative doesn't just hand developers a 3D digital asset; it provides a highly validated mathematical representation of physical dynamics. As engineering teams wait for hardware components to scale globally, this model allows them to jumpstart control loop optimization, synthetic data generation, and complex deep reinforcement learning protocols directly from their workstations without needing immediate access to a multi-million dollar physical testbed.
Physics-First Architecture and High-Fidelity Formats
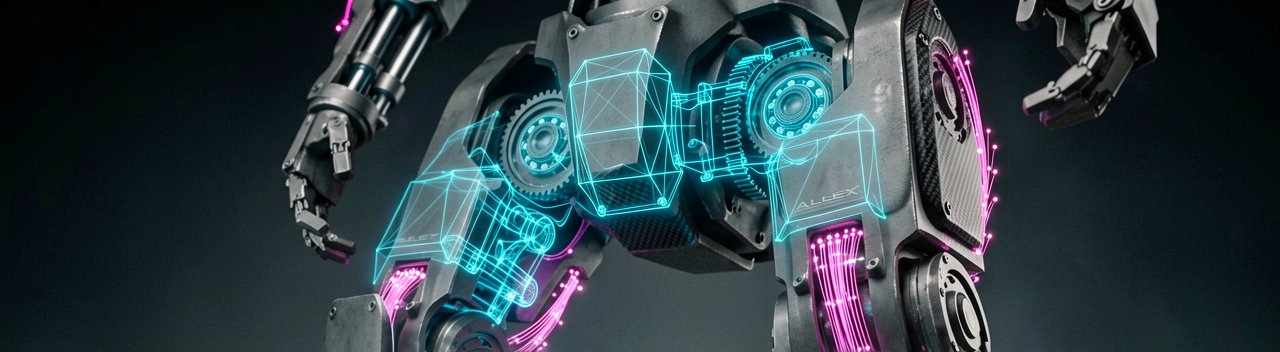
What sets the ALLEX simulation model apart from standard digital twins is its obsessive adherence to real-world physical properties. Rather than relying on simple vision inputs and position-based control tracking, the model focuses on physical attributes like high backdrivability and force transparency. The digital architecture natively maps the intricate friction values, joint torque limits, and whole-body external forces that dictate how the physical humanoid behaves. This physics-first design philosophy allows the virtual version to mirror the real robot's responsiveness down to the millimeter, ensuring that trained algorithms translate smoothly to the physical world.
To maximize utility for developers globally, WIRobotics has packaged this model into industry-standard formats, making it instantly compatible with popular physics engines and frameworks. Engineers can deploy the asset using MuJoCo (MJCF), NVIDIA's Universal Scene Description (USD) via Isaac Sim, or the standard Robot Operating System (URDF) format. This cross-compatibility ensures that whether a team is conducting high-throughput reinforcement learning or building safe human-robot interaction pipelines, the simulated environment handles contact forces and impacts with extreme accuracy.
Validating Performance: From Virtual Sandbox to Real-World Torque
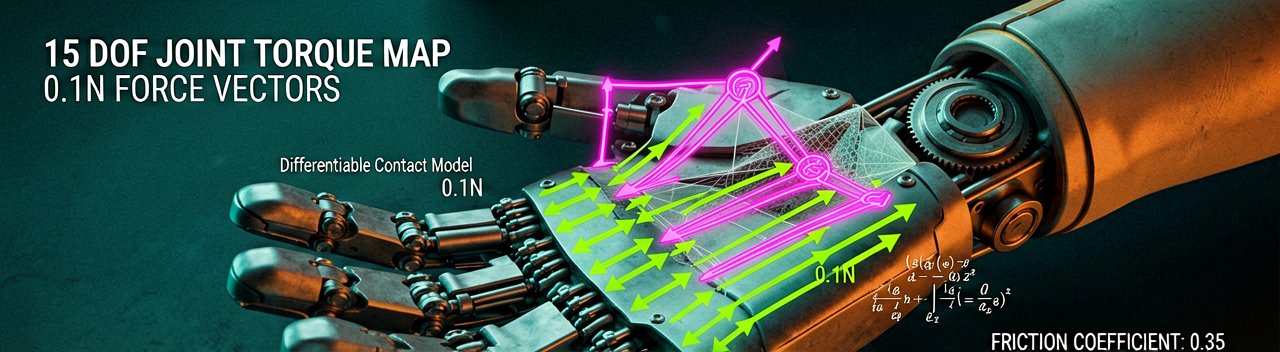
The technical pedigree backing this virtual rollout is rooted in concrete engineering metrics recorded from the physical ALLEX hardware platform. According to technical documentation compiled by PR Newswire, the physical humanoid arm achieves more than ten times lower friction and rotational inertia compared to conventional collaborative robot arms. This exceptionally low mechanical resistance is perfectly mirrored within the simulation model, allowing researchers to accurately test compliant control algorithms that yield safely to external loads. Furthermore, the simulation precisely mimics the robot's unique hand design, which features 15 degrees of freedom and can detect minute reaction forces down to 100 grams-force without relying on heavy tactile sensors.
By achieving tight alignment between simulated and measured joint torques, WIRobotics has managed to shrink the Sim-to-Real gap closer to zero. This enables researchers to validate high-stress scenarios—such as a 30-kilogram hook-grip test or precise fingertip tasks requiring 0.3 mm repeatability—entirely in simulation before committing code to the physical hardware. Backed by a fresh KRW 95 billion Series B funding round and recognized by the prestigious NVIDIA and AWS Physical AI Fellowship, WIRobotics plans to release additional core hardware modules sequentially later this year. This approach paves a clear pathway for developers to transform purely digital discoveries into physical, real-world autonomy.
Deterministic Physics at Scale: Optimizing the Compute Layer
Behind the Scenes: Bridging the sim-to-real chasm requires more than accurate 3D assets; it demands a radical overhaul of how physics engines process high-frequency control loops. When simulating a humanoid hand with 15 degrees of freedom, traditional engines often hit a computational wall, suffering from frame-rate jitter and numerical instability. WIRobotics circumvents this by restructuring the underlying contact solver pipeline, shifting from standard iterative constraint methods to a highly parallelized, semi-implicit integration scheme optimized directly for GPU execution memory. By pinning the simulation's state tensors within localized cache lines, the system eliminates traditional bus latency bottlenecks and guarantees deterministic execution across millions of synthetic training epochs.
From an architectural standpoint, the engineering team prioritized decoupling the low-level torque-control loop from the higher-level perception pipelines. The simulation model utilizes a customized unified memory layout where joint state updates, sensory feedback loops, and actuator dynamics are processed synchronously at 1 kHz. This strict temporal synchronization ensures that synthetic data generation remains tightly bound to real-world clock cycles, drastically reducing temporal drift during long-horizon reinforcement learning tasks. Furthermore, the math backing the contact-dynamics engine substitutes simplified hard-body contact approximations for a continuous, differentiable compliant contact model. This allows gradients to backpropagate smoothly through complex physical impacts without triggering sudden numerical explosions in the loss function.
To scale these massive computations across distributed infrastructure, the architecture leans heavily on custom data serialization techniques. Instead of passing massive, verbose robot state representations across nodes, the engine encodes kinematic states into compact, highly optimized binary matrices that match the memory alignment of modern hardware vector extensions. This memory layout allows the simulation to feed thousands of concurrent agent environments directly into training pipelines running on specialized cluster configurations. The result is a system that not only mirrors the real-world 100-gram force sensitivity threshold but does so at a computational scale that cuts multi-week neural network training cycles down to a matter of hours.
The Scaling Myth and the Realities of Distributed Intelligence
Reading Between the Lines: While the promise of an open Physical AI ecosystem is undeniably alluring, the industry’s pivot toward pure simulation often glosses over a stubborn inconvenient truth. Silicon Valley and global robotics hubs have spent the last half-decade operating under the assumption that throwing infinite compute and flawless digital twins at a neural network will naturally yield physical competence. Yet, the history of embodied AI is littered with perfectly trained virtual models that fundamentally freeze when confronted with the chaotic, non-deterministic friction of a real-world factory floor. WIRobotics’ boasting of ultra-low mechanical resistance and millimeter-level virtual replication sounds impressive on paper, but it risks shifting the bottleneck from hardware engineering to data processing constraints.
There is an inherent architectural contradiction in trying to democratize humanoid robotics via high-fidelity physics engines. To achieve the 100-gram force sensitivity and continuous gradient backpropagation that WIRobotics champions, developers require access to massive, specialized compute infrastructure. The reality is that true zero-drift simulation remains a luxury restricted to entities backed by substantial capital, threatening to centralize development rather than opening it to the masses. Furthermore, relying heavily on a simulation model built by a single company means that independent developers implicitly tie their algorithmic architectures to WIRobotics’ specific hardware assumptions, turning a supposedly open ecosystem into a subtler form of platform lock-in.
Projecting into the next decade, the true test of this roadmap will not be found in sleek virtual demonstrations or optimized tensor layouts, but in the brutal margins of industrial deployment. If the ALLEX simulation model succeeds, it will prove that mechanical compliance can indeed be entirely decoded into software matrices. If it stumbles, it will serve as another cautionary tale that physical reality possesses an infinite number of variables that no semi-implicit integration scheme can ever fully predict. Ultimately, the industry must move past the hype of "digital twins" and realize that a robot cannot think its way out of a poorly calibrated gear ratio, no matter how fast its virtual counterpart can run.
Building a perfect virtual universe where robots never slip, strip a gear, or drop a payload is a brilliant engineering achievement right up until the moment someone plugs in the actual machine and discovers that real dust behaves entirely outside the parameters of a GPU cache line.
Artūras Malašauskas is an AI Systems Integrator with 20+ years of production-grade web engineering experience. He has designed, shipped, and scaled enterprise Python/PHP systems for logistics, SaaS, and public-sector clients. For the past year, he has focused exclusively on AI integrations: deploying open-source LLMs, building generative media pipelines (image, audio, video), and engineering multi-agent workflows for real production environments. His standard: reproducibility, security, cost-efficient inference—no vaporware. He documents and evaluates emerging AI tooling, separating verified capabilities from marketing noise. Technical editor at: muza-ai.eu, ai-verslas.lt, ai-naujinos.lt Connect on LinkedIn
Comments