Silicon Meets Service: Inside YY Group’s NVIDIA-Powered Humanoid Training Lab

The race to put general-purpose humanoid robots into real-world service jobs just took a massive leap forward in Southeast Asia. Singapore-based workforce management provider YY Group has pulled back the curtain on its brand-new Humanoid Robotics Training Lab. Instead of just chasing speculative science fiction, the company is building a highly practical data pipeline aimed at solving chronic service sector labor shortages. It’s a deliberate blend of high-performance physical AI engineering and hard-nosed corporate strategy, turning the messy reality of human labor into a structured playground for neural networks.
The Architecture Fueling Physical AI
You can't train a machine to mimic human grace on consumer-grade silicon, and that's exactly why YY Group chose to build its entire training infrastructure on Barchart-documented NVIDIA Blackwell architecture. This advanced hardware provides the massive parallel computing power required to run complex spatial intelligence simulations and compute real-world physics telemetry on the fly. The Singapore lab doesn’t operate in a vacuum, either; it links up directly with the company’s existing data collection facility in Johor, Malaysia, forming a cohesive cross-border computing grid. This hardware layout lets engineers ingest behavioral data, run deep-learning reinforcement cycles, and instantly push optimization updates to experimental robot fleets.
From Half a Million Humans to High-Performance Metrics
What makes this setup particularly compelling isn't just the raw computing muscle, but the sheer volume of proprietary data feeding into it. YY Group is tapping into its expansive regional network of over 500,000 active workers spanning hospitality, security, and food service roles to record structured, real-world human activity telemetry. According to details shared via GlobeNewswire, this massive dataset allows engineers to train service robots using authentic human movements rather than rigid, pre-programmed code blocks. To prove out these performance metrics under actual pressure, the company has simultaneously launched live pilot deployments of humanoid robots within a major luxury hotel and a prominent shopping mall in Singapore. The goal here is clear: gather continuous physical-interaction telemetry to rapidly sharpen spatial awareness, reduce task latency, and ensure these machines can safely navigate unpredictable, high-traffic human environments.
Deep-Dive Engineering: Optimizing the Physical AI Data Pipeline
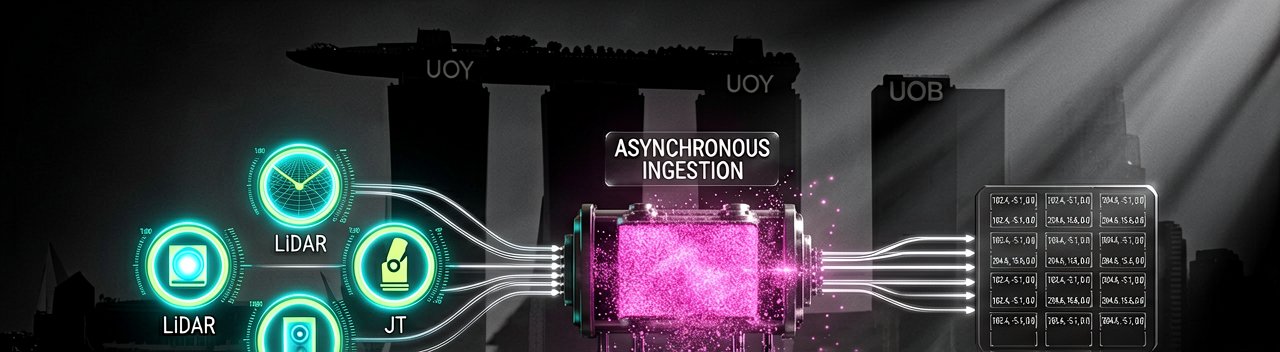
Behind the Scenes: Translating half a million human movements into deterministic robotic locomotion requires more than just throwing computing power at raw telemetry data. Systems engineers at the Singapore facility face a massive ingestion bottleneck, handling multi-modal sensor streams from cameras, LiDAR, and joint torques across the cross-border network. To prevent training latency from stalling, the lab implements an asynchronous data ingestion pipeline that normalizes disparate human behavioral logs into standardized tensor formats before they cross the causeway from Johor. This preprocessing stage strips out ambient noise and downsamples high-frequency positional data, ensuring that only high-fidelity kinematic vectors enter the primary training cluster.
At the silicon layer, the integration of NVIDIA Blackwell architecture shifts the focus toward maximizing mixed-precision Tensor Core utilization. Because training humanoid robots involves both macro-level spatial pathfinding and micro-level finger manipulation, the workload is split across specialized compute kernels. Engineers leverage Transformer Engine technologies to dynamically manage FP4 and FP8 precision states during the deep reinforcement learning cycles. This prevents gradient underflow during delicate motor-control training while allowing the cluster to execute massive matrix multiplications at maximum throughput, significantly reducing the clock time required for model convergence.
Simulation-to-reality (Sim2Real) transfer remains one of the toughest hurdles in physical AI, as virtual physics engines rarely match the chaotic friction of a busy hotel floor. To bridge this gap, the lab runs parallelized rigid-body simulations inside highly optimized virtual environments, exposing the robot's control policy to hundreds of chaotic permutations simultaneously. The Blackwell GPUs handle these massive physics steps concurrently, injecting synthetic sensor noise, uneven floor grip, and random obstacle vectors directly into the simulation. By optimizing the memory bandwidth between the simulation engine and the neural network policy, engineers can run these iterations at thousands of frames per second, ensuring the robot learns to stabilize itself before its physical feet ever touch concrete.
Once a policy proves stable in simulation, deploying it to the edge requires aggressive model compression and inference optimization. The lab utilizes low-bit quantization and structural pruning to condense giant transformer models into lightweight networks that fit comfortably within the robot's onboard compute envelope. This ensures that the local inference engine can process real-world visual and tactile feedback with sub-millisecond latency, which is a critical safety requirement when a hundred-pound machine operates around mall shoppers. Real-world telemetry from the luxury hotel and shopping mall deployments is then packaged into sparse error logs and pushed back to the lab, completing a continuous feedback loop that systematically hardens the robot’s decision-making matrix.
The Reality Check: Scaling Silicon in a Soft-Skill World
Reading Between the Lines: The narrative of replacing human service workers with autonomous humanoids makes for an incredibly compelling corporate press release, but it glosses over a massive economic and technical contradiction. YY Group is leveraging a database of 500,000 real-world workers to train its machines, yet the very industries they are targeting—hospitality and retail—rely entirely on the messy, unquantifiable nuances of human empathy and adaptability. A Blackwell-powered neural network can master the physics of carrying a tray across a luxury hotel lobby, but it cannot compute how to defuse an angry guest or handle a bespoke, non-standard request on the fly. By attempting to automate roles where soft skills are the actual currency, the lab may be over-engineering a solution for problems that require human flexibility rather than raw computing horsepower.
Furthermore, the cross-border logistical pipeline between Singapore and Malaysia introduces its own set of quiet operational bottlenecks. Moving massive, multi-modal training sets across international infrastructure sounds seamless until you factor in real-world data sovereignty laws, edge-to-cloud latency, and the sheer cost of keeping a massive NVIDIA cluster running around the clock. The energy overhead required to train a single humanoid policy to navigate a shopping mall safely could easily eclipse the wages of a human worker for a decade. This creates a stark disconnect between the long-term promise of labor cost reduction and the immediate, staggering capital expenditure required to keep this infrastructure alive.
There is also the friction of the physical world to consider, which has a pesky habit of ruining the most elegant simulation metrics. A luxury hotel floor is a chaotic obstacle course of spilled liquids, erratic children, and unpredictable baggage carts. While running thousands of parallel simulations at high frames per second sharpens a robot's theoretical reflexes, real-world mechanical wear and sensor degradation happen in real time. A single smudged camera lens or a miscalibrated joint sensor can instantly degrade an optimized FP4 inference loop into an operational liability. Until these humanoids can prove they can survive a grueling twelve-hour shift without requiring a team of specialized systems engineers on standby, the training lab remains an expensive sandbox rather than a commercial revolution.
"We are spending millions of dollars teaching cutting-edge silicon how to replicate the exact movements of a retail worker, only to realize the hardest part of the job isn't navigating the store room—it's convincing a shopper that we actually care about their day."
Artūras Malašauskas is an AI Systems Integrator with 20+ years of production-grade web engineering experience. He has designed, shipped, and scaled enterprise Python/PHP systems for logistics, SaaS, and public-sector clients. For the past year, he has focused exclusively on AI integrations: deploying open-source LLMs, building generative media pipelines (image, audio, video), and engineering multi-agent workflows for real production environments. His standard: reproducibility, security, cost-efficient inference—no vaporware. He documents and evaluates emerging AI tooling, separating verified capabilities from marketing noise. Technical editor at: muza-ai.eu, ai-verslas.lt, ai-naujinos.lt Connect on LinkedIn
Comments